「えれくらぶ」とは
Lチカの次のステップと、ロボット制御の楽しみをお手伝い致します。
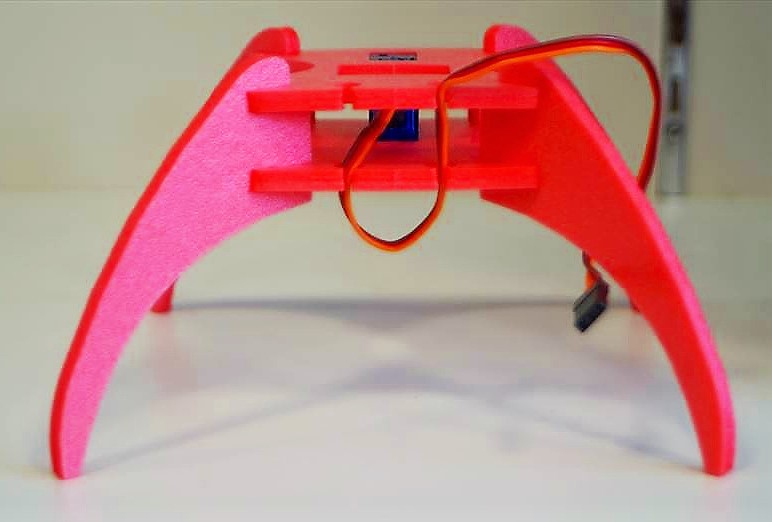
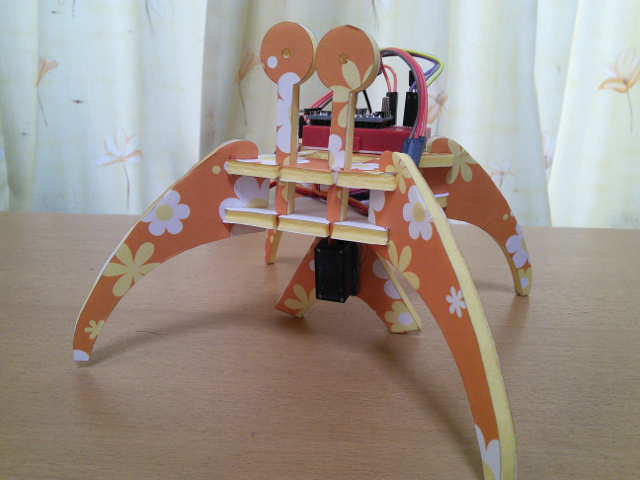
※写真は工作例です。
えれくらぶが歩いている動画はこちら(https://youtu.be/CPvXvORFGMQ)
えれくらぶをTVリモコンで制御している動画はこちら(https://youtu.be/DHqIgcPGxkY)
スペシャルサンクス
福山大学 工学部情報工学科 山之上 卓先生による「えれくらぶ」を実際に使った授業風景です。
概要
「えれくらぶ」は、Lチカの次の一歩が踏み出せない悩みを解決するために製作しました。
サーボモータ2個とマイコンボードで、前後、左前後、右前後の6方位に動かすことができます。
「えれくらぶ」とサーボモータで、次の一歩を踏み出しませんか?
「えれくらぶ」本体は、プラスドライバー、接着剤、工作の時間が10分あれば完成です。
9Vの電池と小さなブレッドボードを乗せるよう設計しています。
ブレッドボードにお手持ちのマイコンボードを積んで、ロボットを制御してみませんか?
「えれくらぶ」の組み立て方
- 「発泡スチロール製カニ型ロボットフレーム」を準備します。
- 部品を全て外します。
無理に外すと折れたりします。注意しながら外してください。

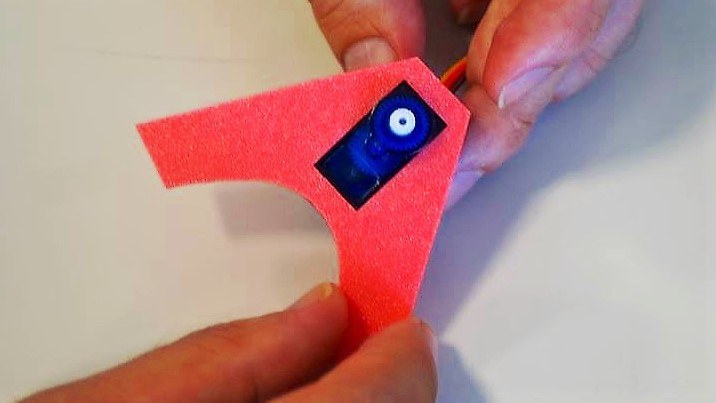
- 最初に下側の胴体を組み立てます。
サーボモータの向きに注意してください。
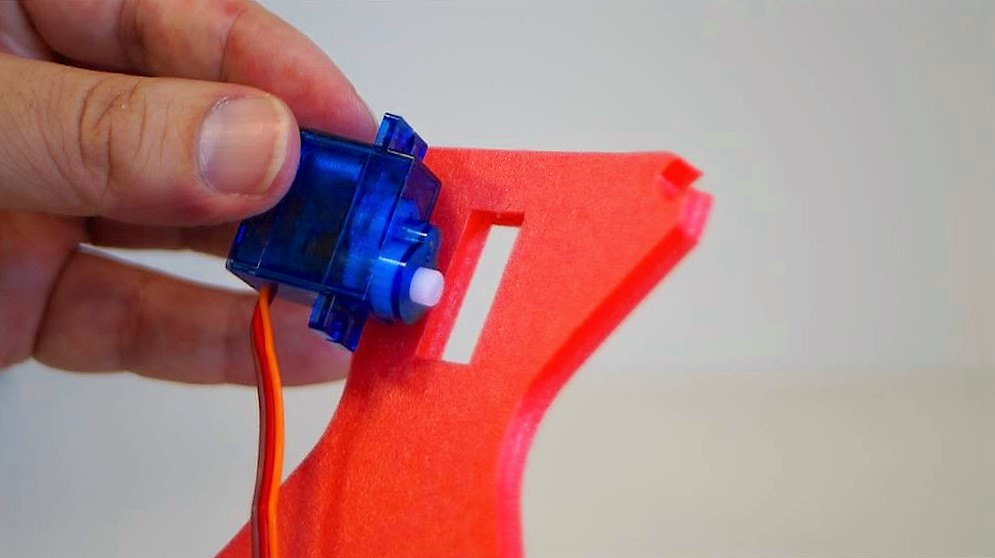
- 次に、上側の胴体と合わせます。
サーボモータの穴は接着剤がいらないよう少しきつめにしています。
壊さないよう慎重にサーボモータを差し込んでください。
- 足をつけると、ようやくロボットらしくなってきます。
上側の胴体は、9Vの電池を入れる四角い穴が空いています。
足は接着剤をつけて、胴体の四隅の溝に奥まで差し込んでください。
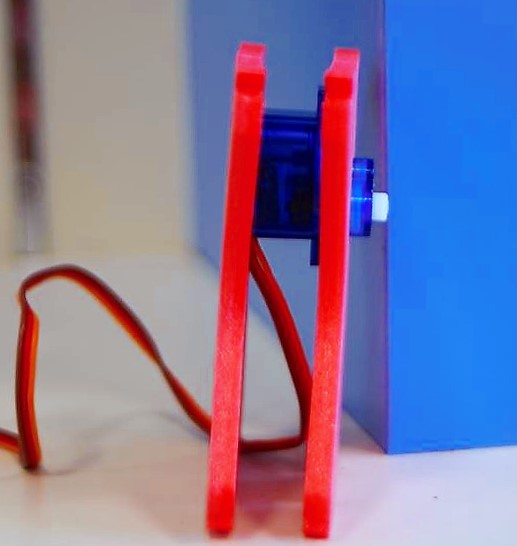
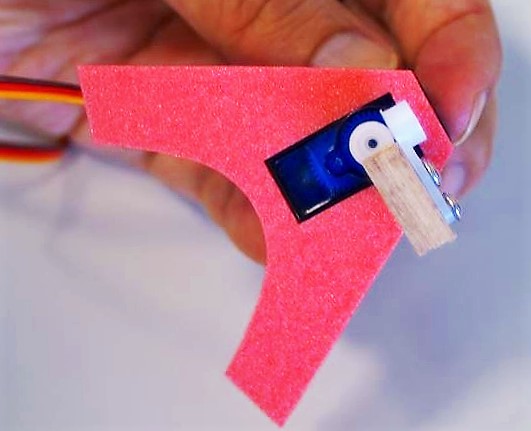
- 可動脚を作ります。
写真のように取り付けてください。その際、サーボモータと可動脚を接着剤で接着してください。
接着剤はちょっと、と思われる方は両面テープで外れないよう止めてください。
この部品に、力がかかります。
- サーボモータの連結部を作ります
長さ1.5cm、6mm角の木の棒と白いプラスチックの接続部品で、接続バーツを作ります。
キリなどで穴をあけておくとネジが締めやすいです。
ネジと白いプラスチックの接続部品は、サーボモータについているものを使います。
部品が小さいですからケガには気を付けて作業してください。

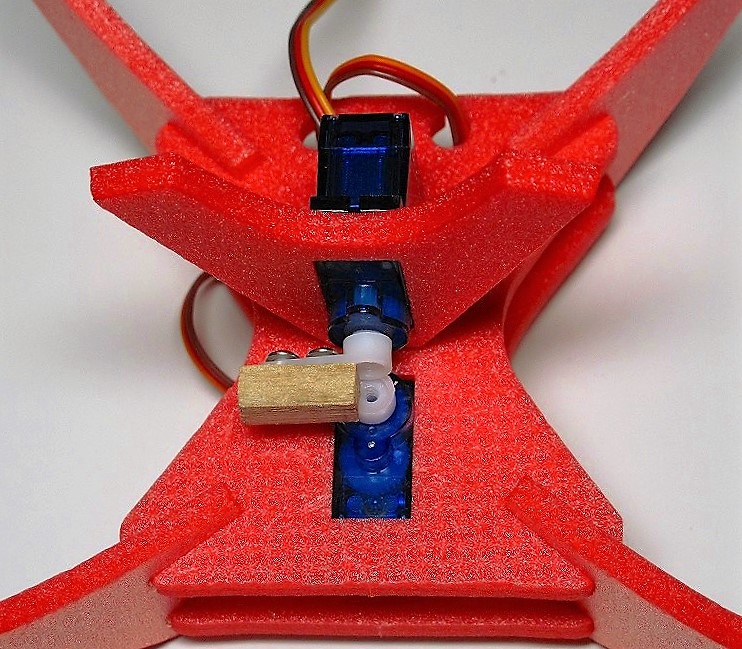
- 可動脚に連結部を取り付けます。
写真の取り付け位置は、サーボモータの回転がちょうど90度になる位置です。
(取り付け前に、一度サーボモータの位置を90度にしておくことをお勧めします。)
サーボモータと連結部の取り付け角度が違うと、歩かせたときに、真っ直ぐのつもりでも右(もしくは左)に進んでしまいます。
- いよいよ、胴体との接続です。
写真の取り付け位置は、サーボモータの回転がちょうど90度になる位置です。
(胴体のサーボモータも取り付け前に、一度サーボモータの位置を90度にしおいてください。)
取り付けが終わったら、サーボモータと連結部をネジで固定します。
- 「えれくらぶ」組立は以上です。お疲れさまでした。
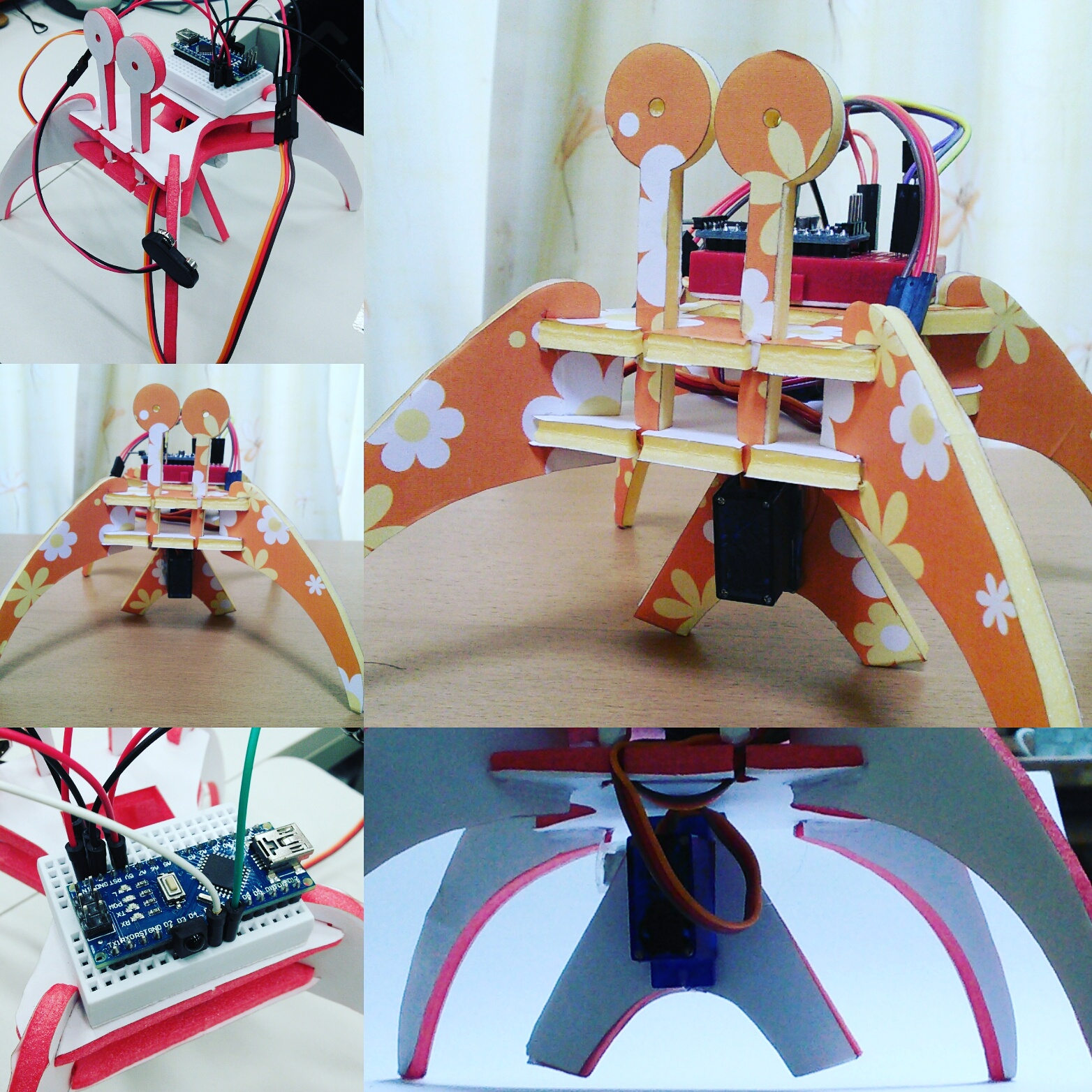
組立例
花柄でえれくらぶをデザインしてみました。
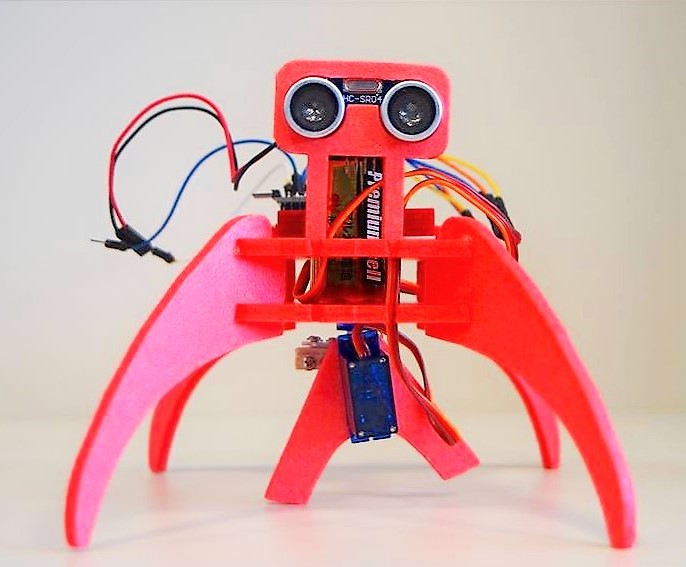
超音波センサーをつけてみました。障害物をよけて歩きます。
購入品(例)
Arduino
Nanoを使った回路図とサンプルスケッチ(例)
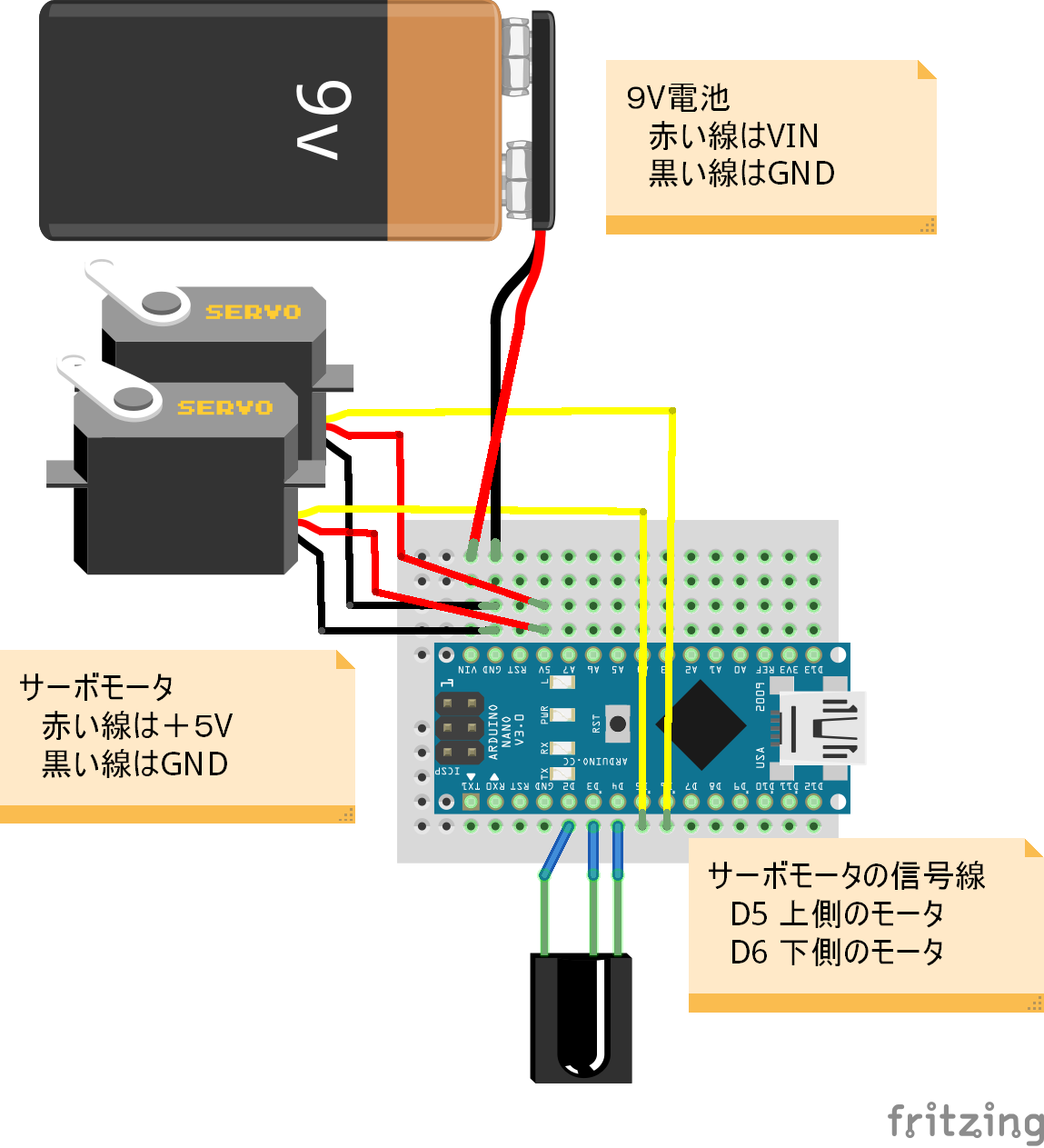
- 基本のスケッチ(こちら)
(6方向に歩く基本的なスケッチです。)
- 赤外線センサーを使ったライブラリ(こちら)
(赤外線リモコン受信モジュール (PL-IRM2121(38kHz)等)をご用意ください。)
- 赤外線センサーライブラリを使ったスケッチを使ったサンプル(こちら)
(赤外線リモコンでえれくらぶを操作するためのスケッチです。)
- 赤外線センサーライブラリを使ったスケッチの雛型(こちら)
(赤外線リモコンでえれくらぶを操作するためのスケッチの雛型です。
この雛型をベースにプログラムしてください。)
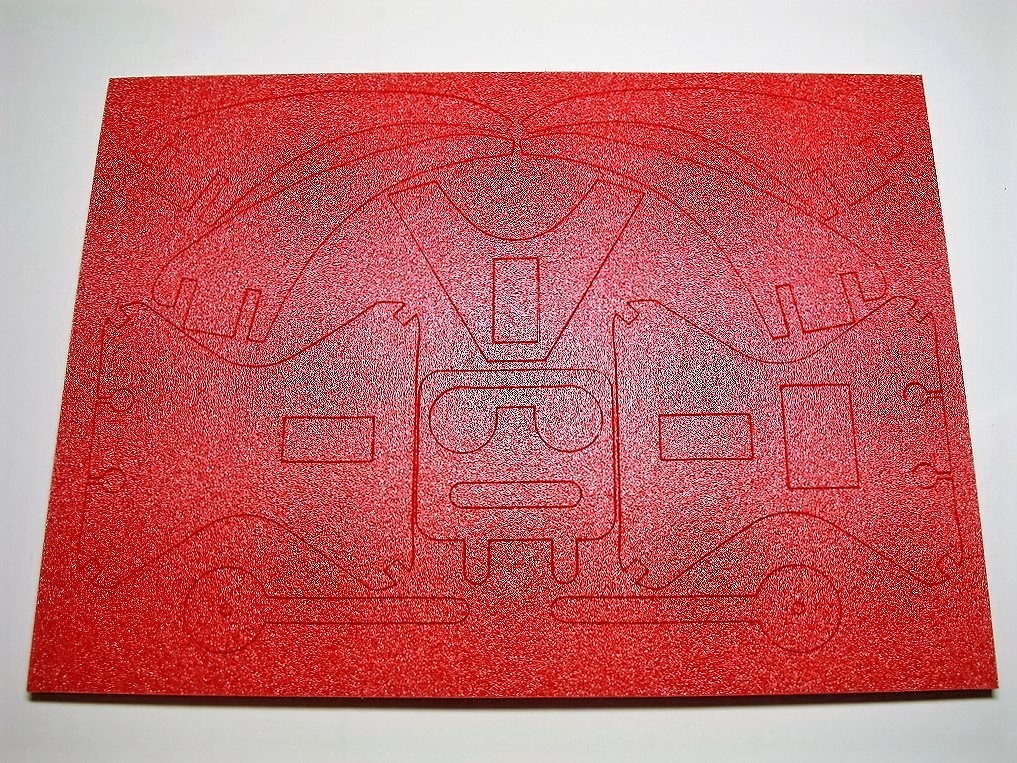
えれくらぶの修理用
- 部品が壊れた時はPDF(こちら)を等倍で印刷して
段ボールに貼り切り抜いてから補修してください。
ワークショップ用組立資料
「えれくらぶ」でご不明な点がございましたら、えれくら!(ふつうのやつ)のイベント開催時、もしくはえれくら!Facebookページへご連絡ください。
最終更新:2016年12月29日 20:04













